PGA atau Programmable Gain Amplifier adalah OpAmp yang memiliki gain pada range tertentu dan dapat diprogram. Jika pada OpAmp biasa pensettingan gain dilakukan menggunakan konfigurasi resistor, maka pada PGA setting gain dilakukan dengan menggunakan software. Hal ini sangat berguna untuk pengukuran besaran analog atau pengaturan tegangan analog yang bersifat dinamis. Yang mana dibutuhkan besaran gain yang fleksibel sesuai kebutuhan.


Pada posting kali ini, PGA yang digunakan adalah MCP6S21 dari Microchip. MCP6S21 memiliki besaran gain +1, +2, +4, +5, +8, +10, +16 dan +32 dengan bandwith 2-12 MHz (typ). MCP6S21 hanya memiliki 1 (satu) channel input. MCP6S21 menggunakan komunikasi SPI untuk pengaturan gain maupun mode shutdown. Model PGA MCP6S21 tidak memiliki pin SO (MISO).



Berbeda dengan tipe MCP6S26 yang memiliki 6 channel input dan MCP6S28 dengan 8 channel input sehingga dapat sekaligus berfungsi sebagai multiplexer. MCP6S26 dan MCP6S28 memiliki pin SO (MISO) sehingga memungkinkan konfigurasi daisy chain (cascade atau bersambung dengan menggunakan SPI yang sama)

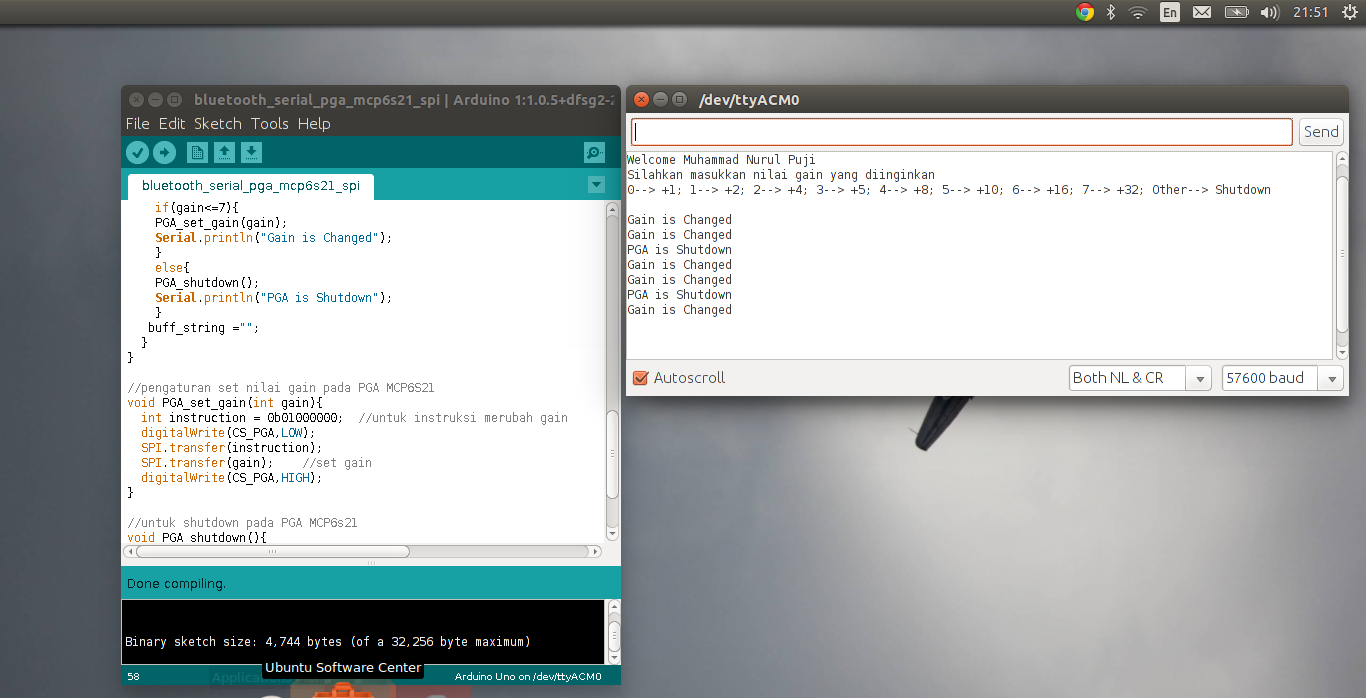
Berikut adalah source code untuk mengatur gain dan mode shutdown pada PGA MCP6S21. Code ini dibuat berdasarkan datasheet dan referensi lain. Source code berikut memungkinkan merubah gain maupun mode shutdown melalui serial terminal. Sehingga bisa dikembangkan untuk komunikasi dengan program desktop lain (seperti VB, Delphi, C atau yang lain).
/*
Author: Muhammad Nurul Puji
muhammadpuji.its@gmail.com
6 Mar 2015
*/
#include <SPI.h>
/*
CS- to pin 10 (SS Pin)
SI- to pin 11 (MOSI Pin)
CLK - to pin 13 (SCK Pin)
*/
const int CS_PGA = 10; //#define CS_PGA 10
char buff_char;
String buff_string = "";
int gain;
void setup()
{
//setting SPI-PGA MCP6S2x
pinMode(CS_PGA,OUTPUT);
SPI.begin();
SPI.setBitOrder(MSBFIRST); //MSB first bit order
SPI.setDataMode(SPI_MODE0); //SPI Mode 0
SPI.setClockDivider(SPI_CLOCK_DIV4); //16MHZ/4=4MHZ
//setting Serial
Serial.begin(57600);
delay(1);
Serial.println("");
Serial.println("Welcome Muhammad Nurul Puji");
Serial.println("Silahkan masukkan nilai gain yang diinginkan");
Serial.println("0--> +1; 1--> +2; 2--> +4; 3--> +5; 4--> +8; 5--> +10; 6--> +16; 7--> +32; Other--> Shutdown");
Serial.println("");
delay(1);
}
void loop()
{
while(Serial.available()) {
buff_char = Serial.read();
buff_string.concat(buff_char);
delay(1); //delay ini sangat penting
}
if(buff_string != ""){
gain=buff_string.toInt();
if(gain<=7){
PGA_set_gain(gain);
Serial.println("Gain is Changed");
}
else{
PGA_shutdown();
Serial.println("PGA is Shutdown");
}
buff_string="";
buff_string="";
}
}
//pengaturan set nilai gain pada PGA MCP6S21
void PGA_set_gain(int gain){
int instruction = 0b01000000; //untuk instruksi merubah gain
digitalWrite(CS_PGA,LOW);
SPI.transfer(instruction);
SPI.transfer(gain); //set gain
digitalWrite(CS_PGA,HIGH);
}
//untuk shutdown pada PGA MCP6s21
void PGA_shutdown(){
int instruction = 0b00100000; //untuk instruksi shutdown
digitalWrite(CS_PGA,LOW);
SPI.transfer(instruction);
SPI.transfer(0); //hanya untuk memenuhi aturan 16bit
digitalWrite(CS_PGA,HIGH);
}

Prosedur PGA_set_gain() dan PGA_shutdown() dapat dikembangkan untuk PGA MCP6S26 maupun MCP6S26 baik mode single maupun mode daisy chain serta untuk pemilihan channel. Hal ini harus disesuaikan dengan datasheet.
Thanks to Mas Rohmadi (http://rohmadi.my.id) atas pinjaman Oscilloscopnya :)
--
Referensi:
http://ww1.microchip.com/downloads/en/DeviceDoc/21117B.pdf (Datasheet)
http://forum.arduino.cc/index.php?topic=19775.0





















{kind=link}